In this article, we will delve into building a liquid neural network from scratch and demonstrate its capabilities using a small image dataset.
For more information, check out our previous article about LNN:
Liquid neural networks
Liquid neural networks are intriguing because they adapt to changing conditions and learn on the job, not just during training. They’re particularly useful for analyzing time series data, making them suitable for tasks like autonomous driving and medical diagnosis.
To build a liquid neural network we should understand the following:
The Concept:
Liquid neural networks are inspired by the microscopic nematode, C. elegans, which has only 302 neurons but exhibits complex dynamics.
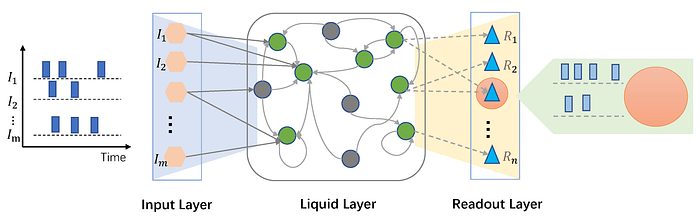
These networks consist of linear first-order dynamical systems modulated via nonlinear interlinked gates.
Architecture: Start with a basic neural network architecture (e.g., feedforward or recurrent). Introduce time-dependent parameters that adapt based on data inputs. Consider using differential equations to model the dynamics.
The neurons in Liquid Network: Pay attention to how neurons activate and communicate via electrical impulses, similar to C. elegans. Allow parameters to change over time within the network.
Training and Adaptation: Train the liquid network using a dataset (you can start with synthetic data). During training, the network will adapt its parameters to the changing input patterns. Use gradient-based optimization techniques (e.g., stochastic gradient descent) to update the parameters.
Implementation of Liquid Neural Network in TensorFlow for Image Classification
Here, we will use the CIFAR-10 dataset for training the LNN. the LNN will be a simple feedforward network:
import numpy as np
import tensorflow as tf
# Load CIFAR-10 dataset
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.cifar10.load_data()
# Normalize pixel values to be between 0 and 1
x_train, x_test = x_train / 255.0, x_test / 255.0
# Define your Liquid Neural Network (LNN) class
class LiquidNeuralNetwork:
def __init__(self, input_size, hidden_size, output_size):
# Initialize weights, biases, time constants, etc.
self.W_in = np.random.randn(input_size, hidden_size)
self.W_hid = np.random.randn(hidden_size, hidden_size)
self.W_out = np.random.randn(hidden_size, output_size)
self.bias_hid = np.zeros(hidden_size)
self.bias_out = np.zeros(output_size)
self.time_constant = 0.1 # Adjust as needed
def forward(self, x):
# Implement the dynamics (e.g., Euler integration)
hidden_state = np.zeros(self.W_hid.shape[1])
outputs = []
for t in range(len(x)):
hidden_state = (1 - self.time_constant) * hidden_state + \
self.time_constant * np.dot(x[t], self.W_in) + \
np.dot(hidden_state, self.W_hid) + self.bias_hid
output = np.dot(hidden_state, self.W_out) + self.bias_out
# Apply activation function (e.g., sigmoid)
exp_output = np.exp(output)
softmax_output = exp_output /
output.append(exp_output)
return np.array(outputs)
# Example usage with CIFAR-10 data
input_size = 32 * 32 * 3 # Input size for CIFAR-10 images
hidden_size = 20
output_size = 10 # Number of classes in CIFAR-10
net = LiquidNeuralNetwork(input_size, hidden_size, output_size)
# Use the training data (x_train) as your input
predictions = net.forward(x_train)
That’s it. Now we have an LNN implemented for the predictions for CIFAR-10 images!
If you like the article and would like to support me make sure to:
📰 View more content on my Medium profile 📰 View more content on AI-ContentLab Blog
Comments
Loading comments…